Media Summary: Original air date: Thursday, May 28, 2026 ⏱️TIMESTAMPS⏱️ 00:00 Intro 1:13 Presenters 1:57 The Urgency of the Collision ... Real-Time Data-Driven Safety-Critical Control in Unknown Multi-Obstacle Environments We incorporate reduced-order and full-body models to ensure safety,
Perception Integrated Safety Critical Control - Detailed Analysis & Overview
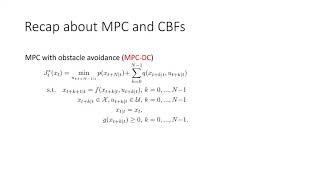
Original air date: Thursday, May 28, 2026 ⏱️TIMESTAMPS⏱️ 00:00 Intro 1:13 Presenters 1:57 The Urgency of the Collision ... Real-Time Data-Driven Safety-Critical Control in Unknown Multi-Obstacle Environments We incorporate reduced-order and full-body models to ensure safety, Safety-critical Control Under Partial Observability: Reach-Avoid POMDP meets Belief Space Control Then, we track the safe velocity with a tracking controller. This culminates in model-free Claire Tomlin (UC Berkeley) Frontiers of Deep Learning.
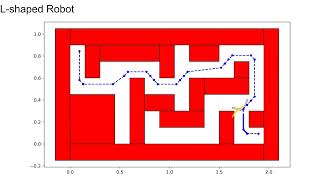
Obstacle avoidance between polytopes is a challenging topic for optimal Richard Murray (California Institute of Technology) Simons Institute Open Lecture Series, Spring 2018 ... Safety-critical Control for Robotic System with Uncertain Model, Unmeasured Velocity and Input Delay Learn about the constraints of your system and how you can enforce those constraints so the system does not violate them.












![Lesson: Perception. [Part 2]](https://i.ytimg.com/vi/IQhjCFSZyQ0/mqdefault.jpg)