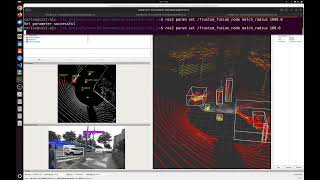
Media Summary: Preception of robots at different positions on ROS. Random sample consensus ( LiDAR Point Cloud Ground Filtering using RANSAC algorithm By establishing a ROS 2 bridge to LG SVL simulation, we applied ground surface extraction
Perception Using Lidar Sensor Ransac - Detailed Analysis & Overview
Preception of robots at different positions on ROS. Random sample consensus ( LiDAR Point Cloud Ground Filtering using RANSAC algorithm By establishing a ROS 2 bridge to LG SVL simulation, we applied ground surface extraction Bounding boxes enclose vehicles. There is one box per detected object. Most bounding boxes can be followed through the First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... This 3D Python tutorial targets 3D shape detection