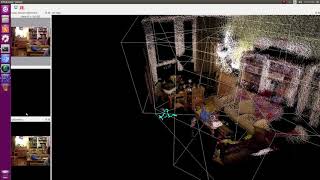
Media Summary: Using TX1 Kinect and ROS roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" this video shown the result about my localization result in Welcome to 2022 ... welcome to the future of aerial
Point Cloud Map Pcm Mapping - Detailed Analysis & Overview
Using TX1 Kinect and ROS roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" this video shown the result about my localization result in Welcome to 2022 ... welcome to the future of aerial This video presents a study case for local Adding RGB information superimposing camera image on Point Cloud Map and Multi Camera Image View
Pointcloud generation with RTAB map and ROS "Incremental and Batch Planar Simplification of Dense Discover how to visualise LiDAR and GIS data on iOS using SciChart, the high-performance 3D charting library for mobile apps.