Media Summary: Policy Guided Exploration for Efficient Sampling-Based Motion Planning in High Dimensions In this video, we have shown the performance of our proposed incremental learning framework on learning and generalizing a ... Paper: Liam Schramm and Abdeslam Boularias. "Learning-
Policy Guided Exploration For Efficient - Detailed Analysis & Overview
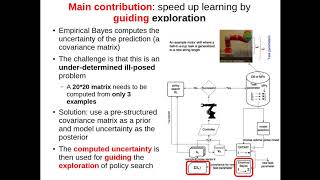
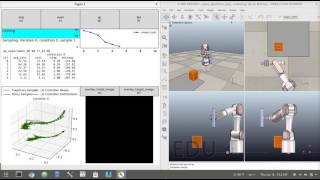
Policy Guided Exploration for Efficient Sampling-Based Motion Planning in High Dimensions In this video, we have shown the performance of our proposed incremental learning framework on learning and generalizing a ... Paper: Liam Schramm and Abdeslam Boularias. "Learning- Short description: In this video, we have shown the performance of our proposed incremental learning framework on learning and ... UoE RL Reading Group 2 March 2023 Speaker: Lukas Schäfer (University of Edinburgh) Title: Ensemble Value Functions for ... The typical application of reinforcement learning is in a partially unknown environment. To learn the environment we "explore" the ...
The video is upload for academic purposes as the partial fulfillment of the course. In this AI Research Roundup episode, Alex discusses the paper: 'SOE: Sample- abstract: Dynamic loco-manipulation calls for Why Is Learning Astronomy Important for Understanding Space ICRA 2018 Spotlight Video Interactive Session Wed PM Pod T.2 Authors: Hazara, Murtaza; Kyrki, Ville Title: Speeding up ... In this video, we delve into the world of Reinforcement Learning (RL) and explore
As the animation above shows, attempting to directly optimize the behavior leads to local optima. Automatically evolving suitable ... ICRA 2026 /RA-L 2025 Project website: Coordinate Measuring Machines (CMMs) are widely used for ...