Media Summary: My presentation is entitled as Adaptive Gradient-Descent Pose Estimation by using EKF for a ground vehicle A visual introduction to Kalman Filters and to the intuition behind them. ----------------------------------------------- Timestamps: 0:00 Intro ...
Pose Estimation By Using Ekf - Detailed Analysis & Overview
My presentation is entitled as Adaptive Gradient-Descent Pose Estimation by using EKF for a ground vehicle A visual introduction to Kalman Filters and to the intuition behind them. ----------------------------------------------- Timestamps: 0:00 Intro ... Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ... In this video, we explain how to derive the The ellipses represent the uncertainty in the
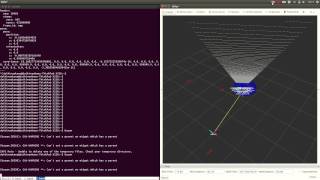
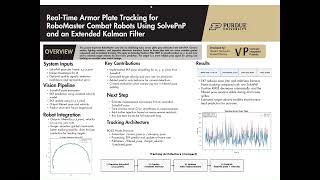
Sensor Fusion of Lidar and Radar data for 2D position and velocity Extended Kalman Filter Tracking for RoboMaster Armor Plate Pose Estimation Christopher Kao presents his EAS 499 engineering senior thesis project on near-future In this setup, Parrot AR.Drone Quadcopter is used. There are 2 landmarkers that the robot camera detects and uses as ... Real-time Monocular navigation for small drone using EKF for pose estimation and 3d mapping


![[IROS2022] Adaptive Gradient-Descent Extended Kalman Filter for Pose Estimation of Mobile Robots](https://i.ytimg.com/vi/tnvQL6gQZOc/mqdefault.jpg)