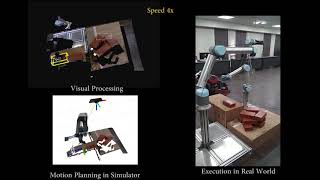
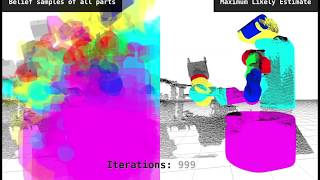
Media Summary: MIT 6.881 Final Project presentation Fall 2020 Lucy Lee, Yorai Shaoul. Reference: Tremblay, Jonathan, et al. "Deep For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ...
Pose Estimation For Robotic Object - Detailed Analysis & Overview
MIT 6.881 Final Project presentation Fall 2020 Lucy Lee, Yorai Shaoul. Reference: Tremblay, Jonathan, et al. "Deep For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ... 6D Pose Estimation for Robotic Pick and Place In this video, the challenge is to calculate the inverse kinematics of the yumi IDR14050 Vision-based state and pose estimation for robotic bin picking of cables
AUTHORS: Stefan Stevšić, Sammy Christen, Otmar Hilliges IN PROCEEDINGS IEEE Paper: Baichuan Huang, Jingjin Yu, Siddarth Jain Abstract: In this paper, we explore the dynamic ... Project Website: Contact: sai_srinivas.jeevanandam.de ... In the video, the AICA System is running on a Siemens BX-59A controller equipped with an NVIDIA A4000 GPU. It seamlessly ... Xinke Deng, Yu Xiang, Arsalan Mousavian, Clemens Eppner, Timothy Bretl and Dieter Fox Link to the paper: ...












![[HumanTech] Object Pose for Brick Robotic Grasping](https://i.ytimg.com/vi/FnVuRsujjVE/mqdefault.jpg)

![[IROS 25] JENGA: Object selection and pose estimation for robotic grasping from a stack](https://i.ytimg.com/vi/J4IIiy0PLfQ/mqdefault.jpg)



