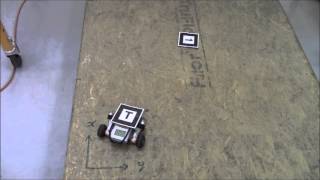
Media Summary: This is a demonstration of a research project Special Topics in Robotics - homework SKKU 2013 Help us caption & translate this video! RBE 550 Motion Planning project Status: Ongoing.
Potential Fields Navigation Using Artoolkit - Detailed Analysis & Overview
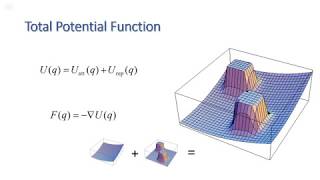
This is a demonstration of a research project Special Topics in Robotics - homework SKKU 2013 Help us caption & translate this video! RBE 550 Motion Planning project Status: Ongoing. This video shows the integration of an Adaptive Artificial In this simulation 4 obstacles are placed side by side creating a wall. Each obstacle is represented as a Gaussian This work was part of my BSc thesis and it is no longer maintained Artificial
AR drone navigation using potential field algorith Collision free navgation implement on a youBot in V-REP enviroment Avoidance of hundreds of moving obstacles This video shows the solution to one of the coding exercises for the lecture 08: PATH-PLANNING, on the online course ...

















![[Path planning] A* algorithm with a potential function for robot navigation](https://i.ytimg.com/vi/FPOo4vpg7ts/mqdefault.jpg)
