Media Summary: Authors: Atharva Mete, Haotian Xue, Albert Wilcox, Yongxin Chen, Animesh Garg Checkout more at: https:// Christian Lessig, Team lead for ML modelling at ECMWF, unpacks Kiyokawa, Takuya, Nagata, Eiki, Tsurumine, Yoshihisa, Kwon, Yuhwan, Matsubara, Takamitsu:
Quest Self Supervised Skill Abstractions - Detailed Analysis & Overview
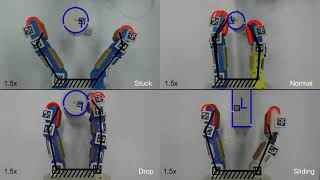
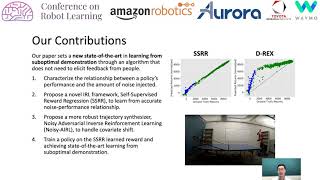
Authors: Atharva Mete, Haotian Xue, Albert Wilcox, Yongxin Chen, Animesh Garg Checkout more at: https:// Christian Lessig, Team lead for ML modelling at ECMWF, unpacks Kiyokawa, Takuya, Nagata, Eiki, Tsurumine, Yoshihisa, Kwon, Yuhwan, Matsubara, Takamitsu: Authors: Andrew S. Morgan, Walter G. Bircher, and Aaron M. Dollar IEEE Transactions on Robotics, 2021. Abstract: Learning ... "**Learning from Suboptimal Demonstration via ... and this work is CASTing Your Model: Learning to Localize Improves
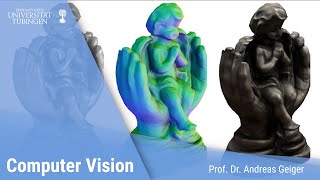
A talk hosted by the Rajpurkar Lab at Harvard which works on developing medical AI. These talks cover recent papers or topics in ... Tool manipulation is vital for facilitating robots to complete challenging task goals. It requires reasoning about the desired effect of ... Lecture: Computer Vision (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ... Abhinav Gupta, Carnegie Mellon University Representation Learning Had a great discussion with Micahel Hodel and a few others (Simon Strandgaard, Yassine and many more) about reverse ... Yuke Zhu UT Austin February 18, 2022 Recent years have witnessed great strides in deep learning for robotics.
![QueST: Self-Supervised Skill Abstractions for Learning Continuous Control [NeurIPS 2024]](https://i.ytimg.com/vi/lgxc7LE-n0Q/mqdefault.jpg)