Media Summary: Real-time monocular image-based 6-DoF localization (Part 5) Real-time monocular image-based 6-DoF localization (Part 2) Real-time monocular image-based 6-DoF localization (Part 1)
Real Time Monocular Camera Localization - Detailed Analysis & Overview
Real-time monocular image-based 6-DoF localization (Part 5) Real-time monocular image-based 6-DoF localization (Part 2) Real-time monocular image-based 6-DoF localization (Part 1) Real-time monocular image-based 6-DoF localization (Part 3) A research project in progress in our lab. This project is for dense 3D geometry reconstruction from a Mobile Robotics Research Team (MR2T) @ AIST Twitter: Webpage: ...
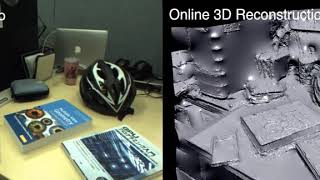
ORB-SLAM3 runs on a remote laptop. The free space of the occupancy map is drawn using the Bresenham's line algorithm, ... ... there are three main advantages for combining the vo pipeline first w pipeline have the proposed system run in Distance estimation from vision is fundamental for a myriad of robotic applications such as navigation, manipulation and planning.