Media Summary: Quadrotors are agile. Unlike most other machines, they can traverse extremely complex environments at high speeds. To date ... H. Jang, S. Lim, S. Huh, W. Byun, S. Yu, and W. Nam, " Reinforcement Learning-based Single-Drone and Multi-Drone Autonomous Exploration
Reinforcement Learning Based Autonomous Uav - Detailed Analysis & Overview
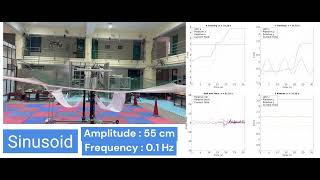
Quadrotors are agile. Unlike most other machines, they can traverse extremely complex environments at high speeds. To date ... H. Jang, S. Lim, S. Huh, W. Byun, S. Yu, and W. Nam, " Reinforcement Learning-based Single-Drone and Multi-Drone Autonomous Exploration In this video, we demonstrate a method to control a quadrotor with a neural network trained using Using Proximal Policy Optimization implemented in Unity ML-Agents. Reinforcement Learning Autonomous Drone Racing Simulation
REINFORCEMENT LEARNING APPROACH FOR AUTONOMOUS UAV NAVIGATION IN 3D SPACE