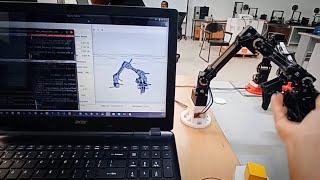
Media Summary: In this research, we propose a user-guided motion planning algorithm in combination Everything that moves will be autonomous and will embody We propose a stochastic graph-based framework for a
Robot Learning From Demonstration Using - Detailed Analysis & Overview
In this research, we propose a user-guided motion planning algorithm in combination Everything that moves will be autonomous and will embody We propose a stochastic graph-based framework for a Speaker: Prof. Tamim Asfour (KIT) About the RIG Lecture Series Started on October 30, 2025, the Full video: Research paper: Abstract: In principle, reinforcement ... Authors: Norman Di Palo and Edward Johns Institution: The
A brief video covering some of the work currently being done in the brown Kim, J., Cauli, N., Vicente, P., Damas, B., Cavallo, F., & Santos-Victor, J. (2018, April). “iCub, clean the table!” A Due to the natural variation in the scene it is difficult to program a fixed motion trajectory for a





![Learning from demonstration using DMPs [Robot Learning]](https://i.ytimg.com/vi/U5Dt89HLMPA/mqdefault.jpg)