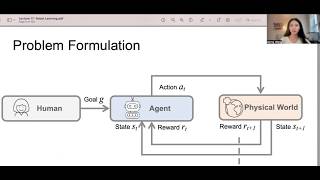
Media Summary: Developed end-to-end simulation-to-reality transfer system for Kejia Ren, Gaotian Wang, Andrew S. Morgan, and Kaiyu Hang Paper available at: BEHAVIOR Challenge (NeurIPS 2025) Winner Deep Dive Recently, me and my teammates Gleb and Akash won 1st place in the ...
Robot Learning Study Sim To - Detailed Analysis & Overview
Developed end-to-end simulation-to-reality transfer system for Kejia Ren, Gaotian Wang, Andrew S. Morgan, and Kaiyu Hang Paper available at: BEHAVIOR Challenge (NeurIPS 2025) Winner Deep Dive Recently, me and my teammates Gleb and Akash won 1st place in the ... CoRL 2022 (www.corl2022.org) - Workshop on " Everything that moves will be autonomous and will embody Jitendra Malik Arthur J. Chick Professor of EECS / VP and Distinguished Scientist University of California at Berkeley / Amazon ...
Today we learn how to do reinforcement learning for robotics in Python with NVIDIA's Isaac Lab. In this 3rd video about inverted pendulum balancing with AI, I compare the results I had with my own algorithm with a state of the ...