Media Summary: In this video, we present MPL's contribution at the 2021 IEEE International Conference on Robotics and Automation (ICRA) for ... ICRA 2018 Spotlight Video Interactive Session Tue PM Pod O.2 Authors: Le Gentil, Cedric; Vidal-Calleja, Teresa A.; Huang, ... In this video, we showcase the process of 3D mapping for a model crane using an
Robust Srif Based Lidar Imu - Detailed Analysis & Overview
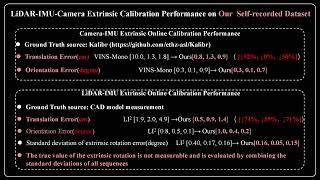
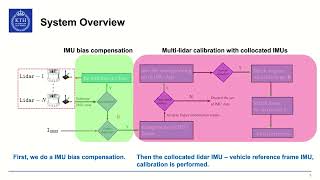
In this video, we present MPL's contribution at the 2021 IEEE International Conference on Robotics and Automation (ICRA) for ... ICRA 2018 Spotlight Video Interactive Session Tue PM Pod O.2 Authors: Le Gentil, Cedric; Vidal-Calleja, Teresa A.; Huang, ... In this video, we showcase the process of 3D mapping for a model crane using an Sensor calibration is the fundamental block for a multi-sensor fusion system. This paper presents an accurate and repeatable ... We show that multiple lidars can be calibrated online Behavior tree framework for global localization using lidar, GPS, wheel encoder and IMU
Video pitch for the International Conference on Robotics and Automation (ICRA) 2018. The paper presented is named "3D- The video walks through three stages of the pipeline: Building a view- Our latest sensor fusion experiments at Carleton using Follow‑up run in the same environment using full‑resolution RoboSense











![[GLIM] Visual-LiDAR-IMU SLAM on a Drone (NTU-VIRAL)](https://i.ytimg.com/vi/9XG8pTl4Up0/mqdefault.jpg)