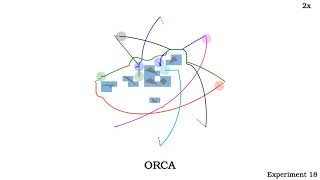
Media Summary: Supplemental video for our paper at DARS 2018. Authors: B. Şenbaşlar, W. Hönig, and N. Ayanian. Abstract: Abstract: In hybrid force-velocity control, the robot can use velocity control in some directions to follow a The system successfully navigates between three pallet stations (1m×1m×1m) and a work table, demonstrating the effectiveness ...
Robust Trajectory Execution For Multi - Detailed Analysis & Overview
Supplemental video for our paper at DARS 2018. Authors: B. Şenbaşlar, W. Hönig, and N. Ayanian. Abstract: Abstract: In hybrid force-velocity control, the robot can use velocity control in some directions to follow a The system successfully navigates between three pallet stations (1m×1m×1m) and a work table, demonstrating the effectiveness ... Conference: IROS 2022 Paper link: arXiv preprint: ... Matthew Turpin, Nathan Michael, Vijay Kumar video submission to ICRA 2013. ICAPS 2015 talk on the paper Michal Čáp, Jiří Vokřínek, Alexander Kleiner. Complete Decentralized Method for On-Line ...
Excited to share our latest work accepted at ! Real-world mobile robots rely on First-Person Views (FPV), but most ... Related papers: Wesley P. Chan, Maram Sakr, Camilo Perez Quintero, Elizabeth Croft, and H.F. Machiel Van der Loos. Towards a ... In this work, we show that this is due to training on unbalanced biased datasets with poor representation for many important gaits ... Manipulator control experiments by Kim-Doang Nguyen. EgoTraj-Bench: Towards Robust Trajectory Prediction Under Ego-view Noisy Observations (with CC) This video demonstrates the capabilities of Asynchronous Decentralized (Revised) Prioritized Planning method (ADPP/ADRPP) ...
Basic information: This video presents additional comparative experimental results. The benchmark method is a Cartographer supports combining data from From 35 raw RRT* waypoints down to 3 after shortcutting, then a time-optimal 2.659-second Work submitted to the 2023 International Conference on Robotics and Automation (ICRA). Preprint available on Arxiv: ... This video demonstrates an approach that applies a collision free motion planner to use