Media Summary: This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... A project that we presented during our masters. It's a UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". SLAM is an important ...
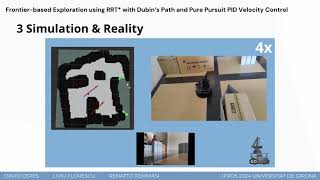
Ros2 Frontier Based Exploration Implementation - Detailed Analysis & Overview
This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... A project that we presented during our masters. It's a UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". SLAM is an important ... Final project for RAS 598 Mobile Robotics at Arizona State University. An autonomous TurtleBot4 that explores unknown ... Frontier based exploration of Turtle bot using ROS Many scenarios in which robots are used nowadays require some degree of autonomous
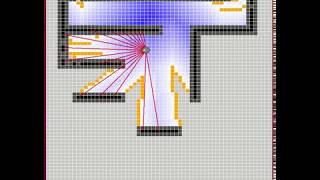
Frontier Based Exploration Algorithm Demonstration. ROS2 Jazzy - Frontier exploration with using Nav2 The robot explored the environment using an improved Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...