Media Summary: EECS498 Introduction to Algorithmic Robotics Final Project (2021 Fall) 0:01 Draw the search tree (blue) 1:50 Draw the planned ... PyBullet nut and bolt using contact constraints (no other joints) In this tutorial, I will show you how to run the Spot Micro simulation
Rrt Collision Using Pybullet - Detailed Analysis & Overview
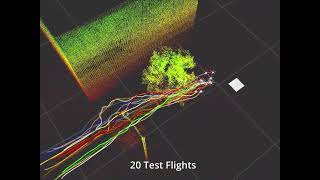
EECS498 Introduction to Algorithmic Robotics Final Project (2021 Fall) 0:01 Draw the search tree (blue) 1:50 Draw the planned ... PyBullet nut and bolt using contact constraints (no other joints) In this tutorial, I will show you how to run the Spot Micro simulation This video shows that the landing path planning accurate inverse kinematics takes about 280 microseconds (0.28 milliseconds) The Robotics Club, IIT (BHU) presents a walkthrough on how to install
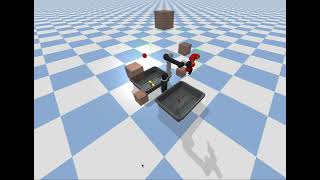
In this video, I built a simple 3D Physics Playground Simulation This is a simulation of a robot arm's manipulation and path planning of grasping three items and putting them to another bin