Media Summary: In Proceedings of Robotics: Science and Systems (RSS) 2022. Keywords: robotic Carl Winge's reimplementation of the paper - " IEEE ICRA 2022 paper Authors: Yoann Fleytoux and Anji Ma and Serena Ivaldi and Jean-Baptiste Mouret Inria, CNRS, Université ...
Sample Efficient Grasp Learning Using - Detailed Analysis & Overview
In Proceedings of Robotics: Science and Systems (RSS) 2022. Keywords: robotic Carl Winge's reimplementation of the paper - " IEEE ICRA 2022 paper Authors: Yoann Fleytoux and Anji Ma and Serena Ivaldi and Jean-Baptiste Mouret Inria, CNRS, Université ... Welcome to Vittles Consult. We help farmers, producer groups, exporters and food businesses implement internationally ... In this work we extensively evaluated the effect of IEEE Robotics and Automation Letters Authors: Marios Kiatos, Iason Sarantopoulos, Leonidas Koutras, Sotiris Malassiotis, Zoe ...
Jessica Borja, Oier Mees, Gabriel Kalweit, Lukas Hermann, Joschka Boedecker, Wolfram Burgard IEEE International Conference ... Robots are nowadays increasingly required to deal Video attachment to our paper: Improving Data B Bischoff, D Nguyen-Tuong, H van Hoof, A McHutchon, CE Rasmussen, A Knoll, J Peters, MP Deisenroth Policy Search For ... Alekh Agarwal, Microsoft Research New York Interactive MERL Researcher Siddarth Jain and MERL intern Baichuan Huang presented their paper titled "EARL: Eye-on-Hand ...
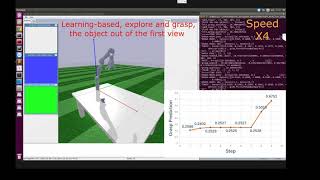
Learning-based Multi-View Exploration for Grasp Detection We have trained two types of cables : black power cables and white ethernet cables. The robot can recognize untrained objects ...












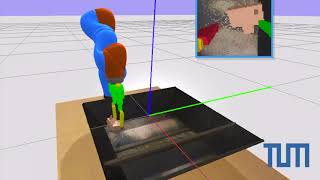


![[IROS 2023] EARL: Eye-on-Hand Reinforcement Learner for Dynamic Grasping with Active Pose Estimation](https://i.ytimg.com/vi/81jbwcbhOVs/mqdefault.jpg)