Media Summary: Lifelong Path Planning with Kinematic Constraints for Multi-Agent Pickup and Delivery (4) RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... We present a brief overview of the Windowed Anytime
Session 4 Multi Agent Path - Detailed Analysis & Overview
Lifelong Path Planning with Kinematic Constraints for Multi-Agent Pickup and Delivery (4) RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... We present a brief overview of the Windowed Anytime We present background and detailed overview of the Windowed Anytime Short presentation of the paper: J. Kottinger, S. Shaull Almagor, and M. Lahijanian, “Explainable In this lecture the BuzzRobot guest, David Bloomin, shares about Neural MMO 2.0 – a massively
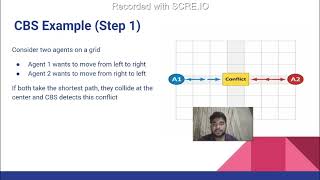
Conflict-Based Search (CBS) and Heuristics The video that describes my research about the Real Time Distributed Multi-agent Path Planning of M* in Belief Space Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable Video by Natalie R Abreu (University of Southern California) AAAI-22 Undergraduate Consortium Efficient Deep Learning Presented at the 2019 Amazon Research Awards Robotics Symposium. In this talk we describe recent progress in the area of ...
Final Project Presentation RBE550: Motion Planning Multi agent Path Planning (using A* & PRM) Advanced AI Project-I on Topic - Conflict Based Search and Heuristic For Multi-Agent Path Finding.