Media Summary: In this tutorial, we'll learn how to create a In this experiment, L by L meters surrounding environment of a mobile robot is presented in the form of a ENLACE interns Yoatzin and Ziyun implemented
Simple 2d Occupancy Grid Map - Detailed Analysis & Overview
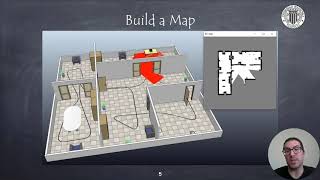
In this tutorial, we'll learn how to create a In this experiment, L by L meters surrounding environment of a mobile robot is presented in the form of a ENLACE interns Yoatzin and Ziyun implemented This video is part of the RoboJackets Software Training Program for Fall 2021. This video shows the prediction performance of the Difference Learning method described in Multi-Step Prediction of As the agent traverses through the environment, the
TOROOC homepage ◼︎ LIKU homepage ◼︎ LIKU instagram ... This video explains how to use the CoppeliaSim plugin to create Moving obstacle information is not being updated in the With the new LabVIEW Robotics Environment Simulator it's possible to simulate the