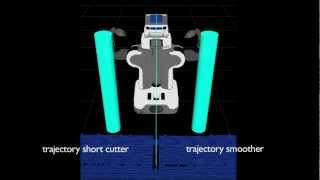
Media Summary: This work presents a novel co-design strategy that integrates trajectory Trajectory optimization is a fundamental tool for controlling robots with complex, nonlinear dynamics. TrajectoryOptimization.jl is ... In this Intro to Robotics lecture, we explore how to make
Stl Based Motion Planning And - Detailed Analysis & Overview
This work presents a novel co-design strategy that integrates trajectory Trajectory optimization is a fundamental tool for controlling robots with complex, nonlinear dynamics. TrajectoryOptimization.jl is ... In this Intro to Robotics lecture, we explore how to make RobotoKAUST KAUST Research Conference on Robotics and Autonomy ... This is a video supplement to the book "Modern Robotics: Mechanics, Authors: H. Nichols, M. Jimenez, Z. Goddard, M. Sparapany, B. Boots, A. Mazumdar ...
This is the presentation movie in English Satoshi Hoshino and Yuusuke Yamada, CNN- A supplementary video for the corresponding paper submission. Title: NMPC- Autonomy Talks - 05/05/21 Speaker: Kristoffer Bergman, Linköping University Title: Tightly Combining Sampling- RRT*: A sampling-based motion planning algorithm Need to get to your goal quickly? Ensure you plan the right path! Robots need to work out how to get from here to there somehow! Manipulation with sampling based motion planning
For more information please visit: www.willowgarage.com. Subject: Mechanical Engineering and Science Course: Robot

![Sampling-Based Motion Planning (1/2) | Intro to Robotics [Lecture 33]](https://i.ytimg.com/vi/NECuabO8WEY/mqdefault.jpg)