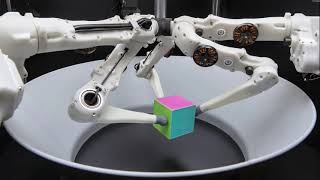
Media Summary: This video presents a summary of results discussed in Herzog A., Schaal S., Righetti L., Designing modern structures that must deform precisely, such as adaptive wings, robotic components, or high-performance ... We present benchmarks for the TriFinger system, an open-source robotic platform for dexterous manipulation and the focus of the ...
Structured Contact Force Optimization For - Detailed Analysis & Overview
This video presents a summary of results discussed in Herzog A., Schaal S., Righetti L., Designing modern structures that must deform precisely, such as adaptive wings, robotic components, or high-performance ... We present benchmarks for the TriFinger system, an open-source robotic platform for dexterous manipulation and the focus of the ... Abstract: In this work we present a Trajectory The fundamental promise of robotics centers on the ability to productively interact with a complex and changing world. Yet, current ... Talk by Michael Posa at BIRS Workshop: "Computational
Jürgen Bellman explains the complex topic of optimizing cable Authors: Michael Posa, Russ Tedrake Title: Trajectory Optimization of Spatial truss using Robot Structural Analysis API capabilities