Media Summary: Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... To help make deep learning more accessible, researchers from NVIDIA have introduced a structured We address the issue of mobile robot navigation in dynamic environments. Paper: ...
Training With Domain Randomization - Detailed Analysis & Overview
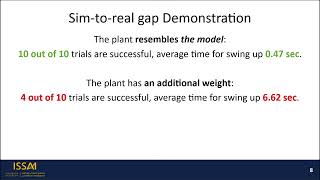
Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... To help make deep learning more accessible, researchers from NVIDIA have introduced a structured We address the issue of mobile robot navigation in dynamic environments. Paper: ... These are the final results we have obtained on reproducing the paper results Craig Buhr, PhD, Engineering Manager at MathWorks was speaking at ODSC East 2020. → To watch more videos like this, visit ... The video demonstrates our solution of the sim-to-real gap of reinforcement learning policy caused by a mismatch of simulated ...
Talk at Deep Learning for Action and Interaction, NIPS 2016, explaining method and results of "CAD2RL: Real Single-Image ... Dynamically changing environments, unreliable state estimation, and operation under severe resource constraints are ... Testing a reinforcement learning policy for static balance on the atom01 humanoid robot ... We have replicated the results of the amazing paper by OpenAI " Taking Robotics Simulation to Reality: Domain Randomization! Recently, deep neural networks trained with imitation-learning techniques have managed to successfully control autonomous cars ...
In this class, we are going to see how to reproduce the results of the famous paper " This work presents the first neural network controller for drone racing that generalizes across physically distinct quadcopters. Visual Transfer for Reinforcement Learning via Wasserstein Domain Confusion









![[Isaac Lab] Atom01 Static Balance RL — With Domain Randomization](https://i.ytimg.com/vi/sYlgWWmgBX4/mqdefault.jpg)








