Media Summary: 00:00:00 - Introduction, goal and aim 00:00:56 - Mathematical model of 3-DOF ship vessel 00:04:54 - Control design: Robust MPC with no error in state estimation -- so just Iterative learning control (ILC) is a control technique that is best suited for systems that perform repetitive tasks, starting from the ...
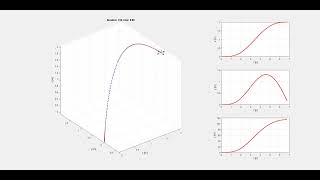
Trajectory Tracking Simulation - Detailed Analysis & Overview
00:00:00 - Introduction, goal and aim 00:00:56 - Mathematical model of 3-DOF ship vessel 00:04:54 - Control design: Robust MPC with no error in state estimation -- so just Iterative learning control (ILC) is a control technique that is best suited for systems that perform repetitive tasks, starting from the ... If you have any questions, please contact my email:modeling199308.com. Minimum Snap Trajectory Tracking MATLAB Simulator In this tutorial I explalin basics of two path
Quad-Rotor Controllers and Observers using discrete-time, linear quadratic regulators. author Quang Nhat Le (quangle.edu) * Complex