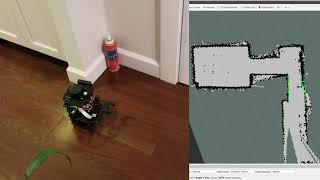
Media Summary: This is a simulation demonstration of building an occupancy grid The following selected individual projects are included in the video. 1. Optical-Flow implementation for robot localization 2. SLAM using Turtlebot3 Waffle and Gmapping
Turtlebot3 Waffle Map Exploration Using - Detailed Analysis & Overview
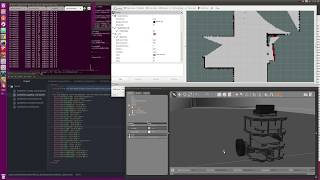
This is a simulation demonstration of building an occupancy grid The following selected individual projects are included in the video. 1. Optical-Flow implementation for robot localization 2. SLAM using Turtlebot3 Waffle and Gmapping How to Create the Map using SLAM in turtlebot3 ( Realtime) Intelligent Mobile Robotics Turtlebot3 Navigation using Map Forced to follow black grids. The path is decided by Answer Set Programming, after the
This video reiterates the steps in the readme of my GitHub project - To ...