Media Summary: This video demonstrates how to use video data to measure the position of a Autonomous navigation test, t265 and custom Simulation of a quadcopter in a gazebo simulator to localize itself in the global environment using the front-facing camera.
Uav Stereo Visual Odometry - Detailed Analysis & Overview
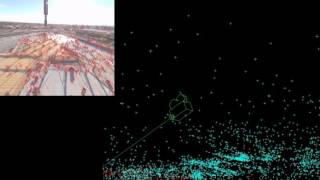
This video demonstrates how to use video data to measure the position of a Autonomous navigation test, t265 and custom Simulation of a quadcopter in a gazebo simulator to localize itself in the global environment using the front-facing camera. Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... High detail 3D reconstruction of trees and an aircraft ahngar from low-altitude Monocular VO only. NO IMU data is used, video only. No post processing. No loop closure. Runs in "real-time" mode, image frame ...
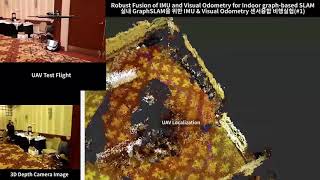
Auto Retrieval for a Micro Air Vehicle (MAV) using RGBD wonkeunyoun.com This research was performed in KARI(Korea Aerospace Research Institute) - Robust IMU & High detail 3D reconstruction of farmland from low-altitude