Media Summary: Sungjoon Choi, Kyungjae Lee, Sungbin Lim, Songhwai Oh, " Uncertainty-aware Learning from Demonstration to Drive Training Uncertainty-Aware Classifiers with Conformalized Deep Learning
Uncertainty Aware Learning From Demonstration - Detailed Analysis & Overview
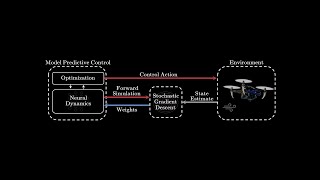
Sungjoon Choi, Kyungjae Lee, Sungbin Lim, Songhwai Oh, " Uncertainty-aware Learning from Demonstration to Drive Training Uncertainty-Aware Classifiers with Conformalized Deep Learning Dr. Malachi Schram is the head of the data scientist department at the Thomas Jefferson National Accelerator Facility. Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex ... Authors: Abdelrahman Eldesokey, Michael Felsberg, Karl Holmquist, Michael Persson Description: The focus in deep
Under review IEEE Transactions on Robotics (T-RO) arXiv: Code: Authors: Yansong Tang, Zanlin Ni, Jiahuan Zhou, Danyang Zhang, Jiwen Lu, Ying Wu, Jie Zhou Description: Assessing action ... This is the updated version of our previous upload. Timeline: 00:17 Introduction to Model-based Reinforcement Authors: João Silvério, Yanlong Huang, Fares Abu-Dakka, Leonel Rozo, Darwin Caldwell. Submitted to the IEEE/RSJ ... IROS 2019, manuscript: End-to-end visual-based imitation Authors: Peter J.T. Kampen, Marcel Reimann, Morten Rieger Hannemose, Anders Nymark Christensen, Miriam Kolko, Anders ...