Media Summary: Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... Ever wondered how robots navigate their surroundings and map out their environment using just cameras? This video breaks ... This talk was presented at the ICRA21 Workshop on
Visual Odometry Explained From Scratch - Detailed Analysis & Overview
Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... Ever wondered how robots navigate their surroundings and map out their environment using just cameras? This video breaks ... This talk was presented at the ICRA21 Workshop on Presentation by Yafei Hu, part of the AirLab Summer School 2020. Sessions list, overviews, and links to repos: ... In this work, Nazrul investigated the integration of both learning-based and classical approaches in monocular Lecture: Self-Driving Cars (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ...
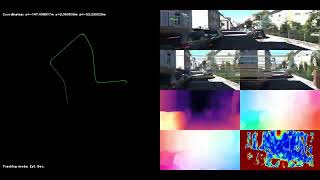
This video talks about the conceptual differences between Extracted SIFT features and reconstructed mosaic of trajectory. An appearance based method is used to estimate the rotation of ... Explore the advanced integration of deep learning in Multiple DSO+ Scale Optimization Demos [Mo et al., IROS 2019]. This video demonstrates how to use video data to measure the position of a drone without GNSS. The presentations from the ArduPilot 2020 unConference All talks were virtual due to the worldwide health restrictions.
Ever wondered how robots and autonomous vehicles understand their movement and surroundings without GPS? This video ...