Media Summary: Computer Science/Discrete Mathematics Seminar I Topic: Real time collision avoidance during locomotion of the humanoid robot COMAN. Teaser for the full IJCAI-20 talk about ``Ddo,
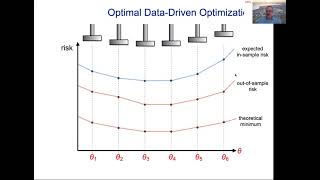
A Generic Optimization Based Framework - Detailed Analysis & Overview
Computer Science/Discrete Mathematics Seminar I Topic: Real time collision avoidance during locomotion of the humanoid robot COMAN. Teaser for the full IJCAI-20 talk about ``Ddo, Complete talk of the online presentation at IJCAI-2020** Abstract: This paper presents ddo, KITTI dataset. Stereo VO is fused with GPS. Open-source code: Autonomy Talks - 19/07/2022 Speaker: Prof. Laura Ferranti, TU Delft Title: An
Data-Driven Modeling in Control with Thoughts on Formulating Deep neural networks have achieved state-of-the-art performance on many tasks such as image classification (He et al, 2016) ... Short introduction to OpenMDAO with sample test functions How to use OpenMDAO with sample test functions OpenMDAO ... Neural networks predictions are unreliable when the input sample is out of the training data distribution or corrupted by noise. CRCS Lunch Seminar (Monday, March 21, 2011) Speaker: Yiling Chen, SEAS Harvard Title: An Presenter: Philippe Laborie [IBM Data & AI] Abstract: Classical scheduling problems (like job-shop or RCPSP) are among the ...
The twentieth talk in the third season of the One World Huy Q. Do, Alejandro M. Aragón, and Dingena L. Schott, Faculty of Mechanical, Maritime and Materials Engineering, Delft ...