Media Summary: Midterm presentation for AERO4842 - Spacecraft Design 2 with Professor Alex Ellery Presented by Aaron vandenEnden. In our recent submission to the 2016 International Conference on Robotics and Automation (ICRA), we proposed an online, Currently, state-of-the-art in aerial robot autonomy uses sensors that can directly perceive the world in 3D and a massive amount ...
Active Vision Based Control For - Detailed Analysis & Overview
Midterm presentation for AERO4842 - Spacecraft Design 2 with Professor Alex Ellery Presented by Aaron vandenEnden. In our recent submission to the 2016 International Conference on Robotics and Automation (ICRA), we proposed an online, Currently, state-of-the-art in aerial robot autonomy uses sensors that can directly perceive the world in 3D and a massive amount ... Bruno Olshausen, UC Berkeley Representation Learning Snippet from paper: Morgan, A.S., Wen, B., Liang, J., Boularias, A., Dollar, A.M., and Bekris, K., ... Daisuke Wako, Shingo Kagami, Koichi Hashimoto: 1000-fps Visual Feedback
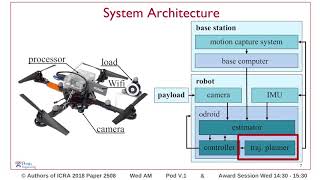
How does a fixed-wing loitering munition lock onto a moving target at 50 m/s without GPS, Davide Scaramuzza Assistant Professor of Robotics, University of Zurich February 17, 2017 Abstract Autonomous quadrotors will ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod V.1 Authors: Tang, Sarah; Wueest, Valentin; Kumar, Vijay Title: ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.7 Authors: Nishimura, Haruki; Schwager, Mac Title: Preprint: Contact author: xiancaiguazi.edu.cn. Abstract: Most cameras today capture images without considering scene content. In contrast, animal eyes have fast mechanical ...
ICRA 2018 Spotlight Video Interactive Session Tue PM Pod V.8 Authors: T. Rodrigues, Rômulo; Basiri, Meysam; Aguiar, A. Pedro; ... In this work, we developed a real-time, learning-