Media Summary: Low level Active Visual Navigation Increasing robustness of vision based localization using potentia David Watkins-Valls*,1, Jingxi Xu*,1, Nicholas Waytowich2 and Peter Allen1 We present a robot We present ReViND -- a method that combines the strength of offline RL with topological graphs to get customizable long-range ...
Low Level Active Visual Navigation - Detailed Analysis & Overview
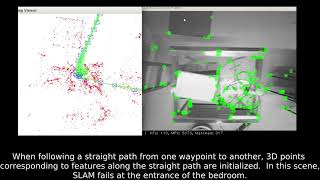
Low level Active Visual Navigation Increasing robustness of vision based localization using potentia David Watkins-Valls*,1, Jingxi Xu*,1, Nicholas Waytowich2 and Peter Allen1 We present a robot We present ReViND -- a method that combines the strength of offline RL with topological graphs to get customizable long-range ... Learning Robust Agents for Visual Navigation in Dynamic Environments Learning for Dynamics and Control (L4DC), 2020. In modern warfare, GPS cannot be relied upon. Palantir's
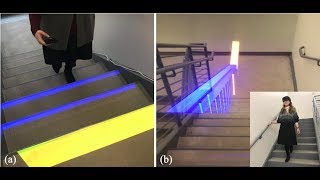
NaviNote, our CHI 2026 Honourable Mention, gives blind and