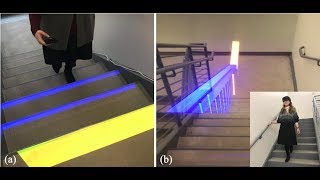
Media Summary: Low level Active Visual Navigation Increasing robustness of vision based localization using potentia David Watkins-Valls*,1, Jingxi Xu*,1, Nicholas Waytowich2 and Peter Allen1 We present a robot NaviNote, our CHI 2026 Honourable Mention, gives blind and
Low Level Active Visual Navigatio - Detailed Analysis & Overview
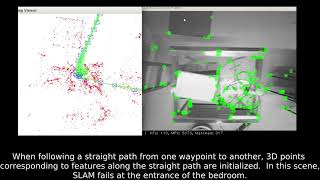
Low level Active Visual Navigation Increasing robustness of vision based localization using potentia David Watkins-Valls*,1, Jingxi Xu*,1, Nicholas Waytowich2 and Peter Allen1 We present a robot NaviNote, our CHI 2026 Honourable Mention, gives blind and A team at the University of Michigan designed a navigational device that uses a depth camera, robotics algorithm, and a haptic ... The robot was trained to follow a path and then the room is slightly reconfigured. Walking safely in complex and possibly dangerous terrain involves using some advanced