Media Summary: Authors: Raghad Alghonaim and Edward Johns Institution: The Robot Learning Lab at Imperial College London Website: ... Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... To help make deep learning more accessible, researchers from NVIDIA have introduced a structured
Benchmarking Domain Randomisation For Visual - Detailed Analysis & Overview
Authors: Raghad Alghonaim and Edward Johns Institution: The Robot Learning Lab at Imperial College London Website: ... Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... To help make deep learning more accessible, researchers from NVIDIA have introduced a structured On our approach to randomizing objects, texture and other scene components within the realistic values. Accuracy and precision in image detection even with scarce training data. Unsupervised Feature Learning for Manipulation with Contrastive
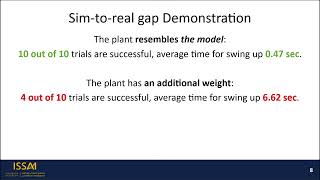
Best Cognitive Robotics Paper Award Finalist. Website: Abstract: Policies trained in ... Authors: Dániel Horváth, Gábor Erdős, Zoltán Istenes, Tomáš Horváth, and Sándor Földi ... The video demonstrates our solution of the sim-to-real gap of reinforcement learning policy caused by a mismatch of simulated ... InfiniBench: Infinite Benchmarking for Visual Spatial Reasoning with Customizable Scene Complexity Presentation at ICRA 2021 of our Bayesian Yuki Kadokawa, Lingwei Zhu, Yoshihisa Tsurumine, Takamitsu Matsubara Cyclic Policy Distillation: Sample-Efficient Sim-to-Real ...