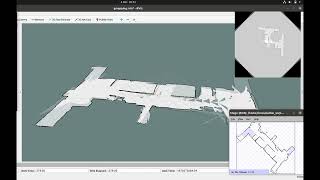
Media Summary: Two robots traverse around the map by avoiding obstacles in their local vacinity. They build their own maps independently using ... The video shows two approaches implemented during the work of the project: synchronous and asynchronous approaches. Contact us! Phone: 1-(860)-881-0115 Email: paul.com Visit our website: Like us on Facebook: ...
Collaborative Slam 2014 - Detailed Analysis & Overview
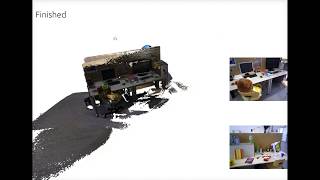
Two robots traverse around the map by avoiding obstacles in their local vacinity. They build their own maps independently using ... The video shows two approaches implemented during the work of the project: synchronous and asynchronous approaches. Contact us! Phone: 1-(860)-881-0115 Email: paul.com Visit our website: Like us on Facebook: ... Abstract: we present an innovative approach to Pitch Video ICRA 2018: Marco Karrer and Margarita Chli. "Towards Globally Consistent Visual-Inertial This video shows the experimental results of the paper presented at International Conference on Robotics and Automation ICRA ...
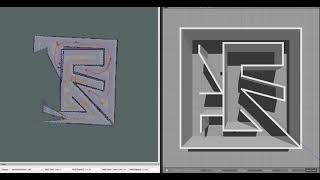
Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... The video shows a real-time experiment of Welcome to TechLab ! How do robots explore unknown environments and build maps on their own? In this complete ... Real-time Multi Camera collaborative SLAM Collaborative Multi Robot Incremental SLAM with 2 MAVs





![[ICRA14] SLAM for aerial manipulation fusing range-only sensor and visual markers](https://i.ytimg.com/vi/0XO4i9dEk_c/mqdefault.jpg)








