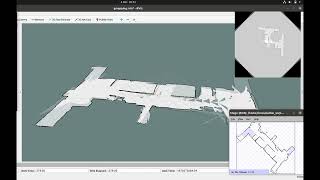
Media Summary: Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... This video contains two real scenario experiments conducted with our self-developed robot and is played at 6X speed. Abstract: we present an innovative approach to
Collaborative Slam With Map Merging - Detailed Analysis & Overview
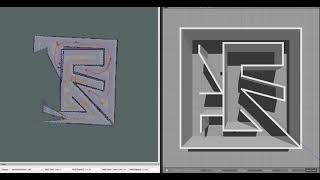
Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... This video contains two real scenario experiments conducted with our self-developed robot and is played at 6X speed. Abstract: we present an innovative approach to Video of the simulation test of our new ROS packages for the multi robot a novel and semantic approach has been developed to solve the In many autonomous driving and robotics applications, we need to create a
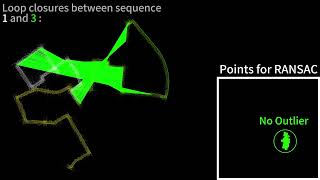
In this project we have two robots each do 3 agents equipped with a single Velodyne VLP-16 and MP9250 IMU each. Data captured at Main Building, Tsinghua University. EPSRC funded Robotics for Nuclear Environments (RNE) Programme Grant. Video demonstration of laboratory based testing of ... Map Merging Algorithm Demonstration for SWARM This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... This paper introduces LAMM, an open-source framework for large-scale multi-session 3D LiDAR point cloud