Media Summary: a novel and semantic approach has been developed to solve the ENLACE interns Yoatzin and Ziyun implemented A new feature in Ops Center allows you to
Map Merging Technique For Occupancy - Detailed Analysis & Overview
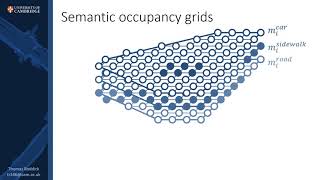
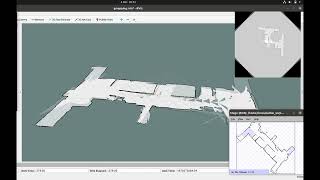
a novel and semantic approach has been developed to solve the ENLACE interns Yoatzin and Ziyun implemented A new feature in Ops Center allows you to Authors: Thomas Roddick, Roberto Cipolla Description: Autonomous vehicles commonly rely on highly detailed birds-eye-view ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.3 Authors: Mangelson, Joshua; Dominic, Derrick; Eustice, Ryan; ... Video of the simulation test of our new ROS packages for the multi robot
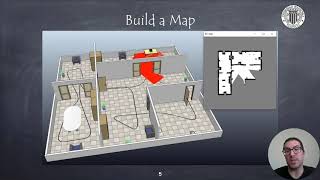
This video explains how to use the CoppeliaSim plugin to create Multi robots are exploring the environment using Autonomous exploration in Hector SLAM. The