Media Summary: How do robots really know where they are — not just guess? In this video, we dive deep into the world of A Factor-Graph Approach for Optimization Problems with Dynamics Constraints Michael Kaess Assistant Research Professor Robotics ...
Factor Graph 5 Minutes With - Detailed Analysis & Overview
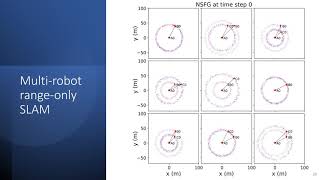
How do robots really know where they are — not just guess? In this video, we dive deep into the world of A Factor-Graph Approach for Optimization Problems with Dynamics Constraints Michael Kaess Assistant Research Professor Robotics ... For more information about Stanford's Artificial Intelligence professional and graduate programs, visit: Ground Encoding: Learned Factor Graph-based Models for Localizing Ground Penetrating Radar The video presents extended results for our paper, On Reference Solutions to Non-Gaussian SLAM
MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2023 University of Michigan - NA 568/EECS 568/ROB 530 For slides, ... Video abstract for paper published in NAVIGATION: Journal of the Institute of Navigation, Volume 71 Number 3. For full paper, or ... Deep neural networks are powerful approximators that have been extremely successful in practice We show that the Talk at the NIPS Workshop on Multi-class and Multi-label Learning in Extremely Large Label Spaces.