Media Summary: By Weisong Wen, Tim Pfeifer, Xiwei Bai, Li-Ta Hsu Video abstract for paper published in NAVIGATION, Journal of the Institute of Navigation, Volume 68 Number 2. For full paper, or ... How do robots really know where they are — not just guess? In this video, we dive deep into the world of
Factor Graph Optimization For Gnss - Detailed Analysis & Overview
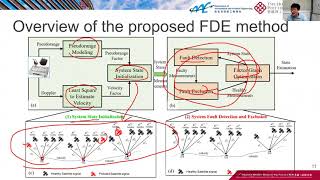
By Weisong Wen, Tim Pfeifer, Xiwei Bai, Li-Ta Hsu Video abstract for paper published in NAVIGATION, Journal of the Institute of Navigation, Volume 68 Number 2. For full paper, or ... How do robots really know where they are — not just guess? In this video, we dive deep into the world of Jonas Beuchert, Marco Camurri, and Maurice Fallon. “ Das Video präsentiert unsere Forschungsarbeit „Continuous-Time Presented in ION GNSS+ 2021: Fault detection and exclusion (FDE) is significant for integrity monitoring of
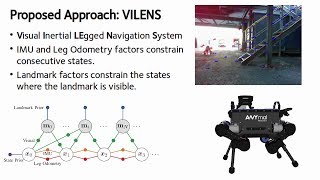
Video abstract for paper published in NAVIGATION: Journal of the Institute of Navigation, Volume 71 Number 3. For full paper, or ... For more information about Stanford's Artificial Intelligence professional and graduate programs, visit: A Factor-Graph Approach for Optimization Problems with Dynamics Constraints "Robust Legged Robot State Estimation Using