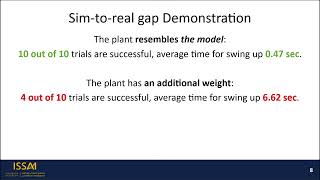
Media Summary: These are the final results we have obtained on reproducing the paper results Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... The video demonstrates our solution of the sim-to-real gap of reinforcement learning policy caused by a mismatch of simulated ...
Flow Based Domain Randomization For - Detailed Analysis & Overview
These are the final results we have obtained on reproducing the paper results Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... The video demonstrates our solution of the sim-to-real gap of reinforcement learning policy caused by a mismatch of simulated ... To help make deep learning more accessible, researchers from NVIDIA have introduced a structured To appear in ICRA 2026: Workshop on the Path Towards Generalizable Contact-Rich Robotics (oral presentation) Title: On ... This Live Class is about how to create datasets from simulations and how to manage them. We are going to see: ▸ How to create ...
We propose Adaptive Curriculum Generation from Demonstrations (ACGD) for reinforcement learning in the presence of sparse ... How can we learn a control policy in simulation such that it transfers to the real robot if all we have is a non-differentiable ... We have replicated the results of the amazing paper by OpenAI " Best Cognitive Robotics Paper Award Finalist. Website: Abstract: Policies trained in ... On our approach to randomizing objects, texture and other scene components within the realistic values. Domain Randomization (Pendulum Environment)
Recently, deep neural networks trained with imitation-learning techniques have managed to successfully control autonomous cars ... Yuki Kadokawa, Lingwei Zhu, Yoshihisa Tsurumine, Takamitsu Matsubara Cyclic Policy Distillation: Sample-Efficient Sim-to-Real ... By Ezra Ameperosa for MS Thesis in the Robotics and Motion Lab at The University of Texas at San Antonio. tiny.cc/pranavb.