Media Summary: Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Full paper here This work was submitted to We present an approach for retartgeting off-the-shelf Virtual Reality (VR) trackers to effectively teleoperate an upper-body ...
Humanoid Self Collision Avoidance Using - Detailed Analysis & Overview
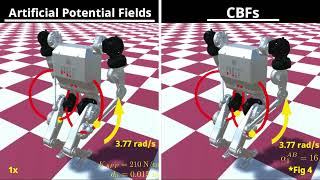
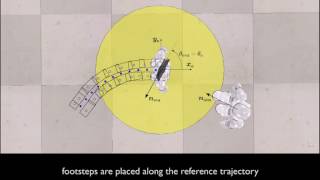
Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Full paper here This work was submitted to We present an approach for retartgeting off-the-shelf Virtual Reality (VR) trackers to effectively teleoperate an upper-body ... The video shows an integrated framework for safe physical PRISMA Lab research video experiments - Reactive This work aims at combining state of the art developments of path planning and optimal control and to create the algorithmic ...
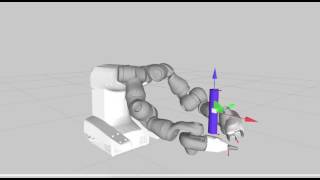
Robonaut model, under Actin control, showing The method shown performs real-time trajectory optimization to let a Robot Manipulator's Dynamic Obstacle Avoidance Consider a robot (the evader) standing in a workspace. A malicious obstacle, here represented by another Discover how Infineon Technologies is enabling the robots of the future This video is the supplementary material to our paper.
Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: