Media Summary: The presented video material is a part of the 'Factory in a Day' project. The PR2 Robot in ... The presented video material is a part of the 'Factory in a Day' project. The PR2 ... Self Collision Avoidance using 'Stack of Tasks' Controller in PR2 Robot - P2
Self Collision Avoidance Using Task - Detailed Analysis & Overview
The presented video material is a part of the 'Factory in a Day' project. The PR2 Robot in ... The presented video material is a part of the 'Factory in a Day' project. The PR2 ... Self Collision Avoidance using 'Stack of Tasks' Controller in PR2 Robot - P2 Robonaut model, under Actin control, showing TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) Reach Control improves the effectiveness, accuracy and control of Reach System manipulators. It packages an intuitive HMI
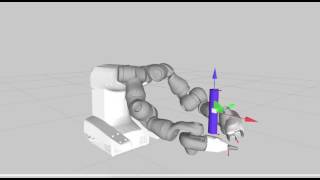
This work uses vector field inequalities (VFI) to prevent robot Fixed targets for both arms (yellow points); active PRISMA Lab research video experiments - Reactive This demo displays the result of the internship at DLR. The goal is to validate a 12-DoF robot arm, in simulation under Actin control, showing More information available at: www.ros.org/wiki/multi_robot_collision_avoidance.
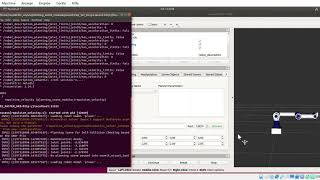
This video demonstrates the real-time robot path planning in action for dynamic Video of the Test n.2 presented in the paper "Multiple ... the EU-project CROPS) showing its model for