Media Summary: Henrique Ferrolho, Wolfgang Merkt, Vladimir Ivan, Wouter Wolfslag, Sethu Vijayakumar, “ Abstract - In this work, we present a system architecture to enable autonomous navigation of multiple agents across user-selected ... Passivity Filter for Variable Impedance Control by Maciej Bednarczyk, Hassan Omran and Bernard Bayle.
Iros 2020 Presentation Optimizing Dynamic - Detailed Analysis & Overview
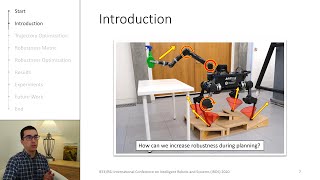
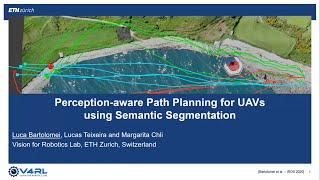
Henrique Ferrolho, Wolfgang Merkt, Vladimir Ivan, Wouter Wolfslag, Sethu Vijayakumar, “ Abstract - In this work, we present a system architecture to enable autonomous navigation of multiple agents across user-selected ... Passivity Filter for Variable Impedance Control by Maciej Bednarczyk, Hassan Omran and Bernard Bayle. Driving Through Ghosts: Behavioral Cloning with False Positives Andreas Bühler, Adrien Gaidon, Andrei Cramariuc, Rares ... Abstract - In this work, we present a perception-aware path-planning pipeline for Unmanned Aerial Vehicles (UAVs) for navigation ... Preprint: Abstract: Adaptive control can address model uncertainty in control systems. However ...
Sungho Yoon and Ayoung Kim, Balanced Depth Completion between Dense Depth Inference and Sparse Range Measurements ... Multi-robot cooperation requires agents to make decisions that are consistent with the shared goal without disregarding ... Finding Structure Configurations for Flying Modular Robots Bruno Gabrich, David Saldaña, Mark Yim. In this video lecture, we describe some of our on-going work on motion planning for humanoid robots in constrained ... "Fast Manipulability Maximization Using Continuous-Time Trajectory This video is the visualization form for our











![[IROS 2020] Cooperative Control of Mobile Robots with Stackelberg Learning](https://i.ytimg.com/vi/t8lPpKMTFOA/mqdefault.jpg)




![[IROS 2022] Learning Time-optimized Path Tracking with or without Sensory Feedback - Presentation](https://i.ytimg.com/vi/hBukfMs6We8/mqdefault.jpg)

