Media Summary: Get all the ROS code of the video in this link: In the following video, we are going to explain, using ... Solving integration issues with ROS2 Nav2 in autonomous robot simulations. Lets discuss intricacies of YAML parameters for ... ROS- Local Costmap/Footprint fluctuates around map.
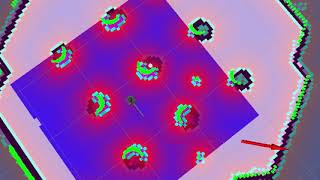
Local Costmap - Detailed Analysis & Overview
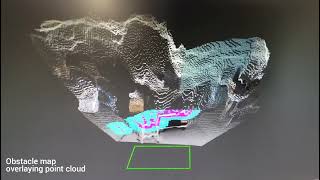
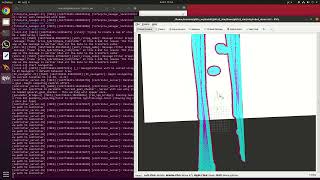
Get all the ROS code of the video in this link: In the following video, we are going to explain, using ... Solving integration issues with ROS2 Nav2 in autonomous robot simulations. Lets discuss intricacies of YAML parameters for ... ROS- Local Costmap/Footprint fluctuates around map. This video presents new features of the teb_local_planner ROS package introduced in release 0.2. Refer to ... This video shows how we compute the terrain Example Video EKF Map to Odom Localization Obstacles Moving with Local Costmap
VFF as local planner (local costmap: 2x2m with 5cm resolution) ... 24:49 depth_layer 26:37 inflation_layer 27:15 Global Costmap .yaml 28:33 Global Costmap Depth Config 28:50 VFF as local planner (local costmap: 3x3m with 10cm resolution) VFF as local planner (local costmap: 3x3m with 5cm resolution) Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://i.ytimg.com/vi/qPNs6pAZGtA/mqdefault.jpg)