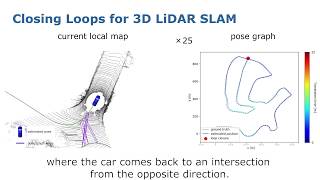
Media Summary: Simulation of a robot driving around and observing landmarks (objects). Ever wondered how robots navigate complex environments and build accurate maps? This video dives deep into the crucial role ... Talk for the RSS 2020 paper: X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, ...
Loop Closure During Slam - Detailed Analysis & Overview
Simulation of a robot driving around and observing landmarks (objects). Ever wondered how robots navigate complex environments and build accurate maps? This video dives deep into the crucial role ... Talk for the RSS 2020 paper: X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, ... Using ORB SLAM2 from link with some modifications. Ever wondered why some robotic mapping systems are more accurate than others? This video delves into the crucial concept of ... Thesis Video: Lidar-Inertial SLAM With Loop closure In KITTI Dataset
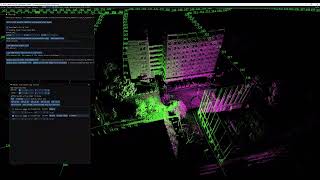
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... Ever wondered how robots and autonomous systems navigate their environment with precision? This video dives into a critical ... Sequence shows how frame dropping and blur trigger the true scale relocalization mechanism. The final frames show the online ... X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, “OverlapNet: This tool will help You annotating ground truth Ever wondered how robots navigate complex environments without getting lost or mapping inaccuracies? This video dives into ...




![Loopy-SLAM: Dense Neural SLAM with Loop Closures [CVPR 2024]](https://i.ytimg.com/vi/tQCKjno0Yrk/mqdefault.jpg)