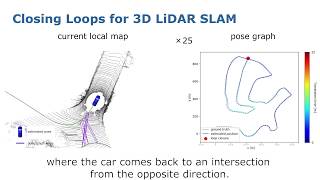
Media Summary: Talk for the RSS 2020 paper: X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, ... Simulation of a robot driving around and observing landmarks (objects). When the robot observes a landmark for the second time, ... X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, “OverlapNet:
Slam With Loop Closure - Detailed Analysis & Overview
Talk for the RSS 2020 paper: X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, ... Simulation of a robot driving around and observing landmarks (objects). When the robot observes a landmark for the second time, ... X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, “OverlapNet: Thesis Video: Lidar-Inertial SLAM With Loop closure In KITTI Dataset In this video, Sabyasachi, Research Associate at IISc Bangalore explains the basics of In this video, Sabyasachi, Research Associate at IISc Bangalore, reviews the paper "Real-Time
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... Ever wondered how robots navigate complex environments and build accurate maps? This video dives deep into the crucial role ... Using ORB SLAM2 from link with some modifications. Sequence shows how frame dropping and blur trigger the true scale relocalization mechanism. The final frames show the online ... Hyungtae Lim†, Daebeom Kim†, and Hyun Myung*, "Multi-Mapcher: Description (0:02--1:02) Experimental Results (1:02--1:32)
Filtering methods like the Extended Kalman Filter fail due to quadratic complexity in state size. Graph

![Loopy-SLAM: Dense Neural SLAM with Loop Closures [CVPR 2024]](https://i.ytimg.com/vi/tQCKjno0Yrk/mqdefault.jpg)