Media Summary: Neural network trained only on synthetic data for skeletal 6D Pose Estimation for Robotic Pick and Place Introductory video of the paper "Real-time Holistic
Robot Pose Estimation From Depth - Detailed Analysis & Overview
Neural network trained only on synthetic data for skeletal 6D Pose Estimation for Robotic Pick and Place Introductory video of the paper "Real-time Holistic Lu, J., Liang, Z., Xie, T., Ritcher, F., Lin, S., Liu, S., & Yip, M. C. (2024). CtRNet-X: Camera-to- Long version for IROS 2020 paper Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. Indirect Object-to- Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. Indirect Object-to-
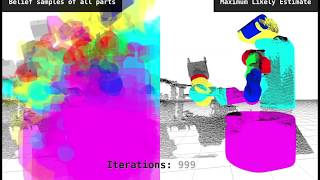
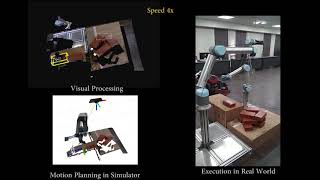
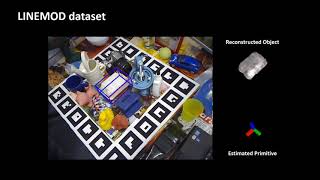
Demonstration video accompanying our paper "3D MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Robust 6D For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ... Authors: Kiru Park, Timothy Patten, and Markus Vincze Title: Neural Object Learning for 6D Vision-based state and pose estimation for robotic bin picking of cables Semi Perspective Decoupled Heatmaps for 3D
Semi Perspective Decoupled Heat maps for 3D In this video, we break down the research paper **"CtRNet-X: Camera-to-

![[ECCV 2024] Real-time Holistic Robot Pose Estimation with Unknown States](https://i.ytimg.com/vi/9NsLJvp1IPE/mqdefault.jpg)








![[HSR-ROBOT] Neural Object Learning for 6D Pose Estimation Using a Few Cluttered Images](https://i.ytimg.com/vi/fQJPS01cmac/mqdefault.jpg)