Media Summary: Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. Long version for IROS 2020 paper Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. AUTHORS: Stefan Stevšić, Sammy Christen, Otmar Hilliges IN PROCEEDINGS IEEE
Indirect Object To Robot Pose - Detailed Analysis & Overview
Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. Long version for IROS 2020 paper Jonathan Tremblay, Stephen Tyree, Terry Mosier, Stan Birchfield. AUTHORS: Stefan Stevšić, Sammy Christen, Otmar Hilliges IN PROCEEDINGS IEEE MIT 6.881 Final Project presentation Fall 2020 Lucy Lee, Yorai Shaoul. State estimation from measured data is crucial for Supplemental material to our paper: "Integrated On-line
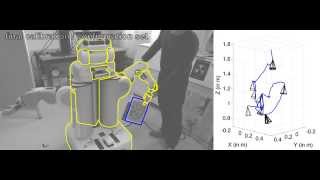
Neural network trained only on synthetic data for skeletal Presentation video for the paper "Precise Multi-Modal In-Hand Vision-based state and pose estimation for robotic bin picking of cables Xinke Deng, Yu Xiang, Arsalan Mousavian, Clemens Eppner, Timothy Bretl and Dieter Fox Link to the paper: ... For more info, including open source code: Hey everyone, This was an assignment for a class I was taking in 2018. I did not expect that it will make this number of views.
Bowen Wen from Rutgers University specializes in