Media Summary: Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... Course project at EPFL for the course CS-503 - Visual Intelligence: Machines and Minds. Project Team : Umer Hasan, Yongtao ... We present a perceptive locomotion controller for quadrupedal
Robust Robot Navigation - Detailed Analysis & Overview
Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... Course project at EPFL for the course CS-503 - Visual Intelligence: Machines and Minds. Project Team : Umer Hasan, Yongtao ... We present a perceptive locomotion controller for quadrupedal This video is to setup the FAST-LIO, highly In this AI Research Roundup episode, Alex discusses the paper: 'Vision-based Goal-Reaching Control for Mobile Senior Software Engineer Daniel Piedrahita explains the theory behind
This video accompanies the paper: J. D. Greer, L. H. Blumenschein, R. Alterovitz, E. W. Hawkes, and A. M. Okamura (2020) ... Designed in response to the DARPA Subterranean Challenge, the This video by University of Maryland Professor Dinesh Manocha's research group shows a new AI method for automatic mapless ... Integration of sampling-based motion planning with artificial potential functions for the multi-agent safe We present the UT Campus Object Dataset (CODa) - the largest multiclass, multimodal urban This video presents a comparative study between state-of-the-art GPS-denied visual-inertial odometry frameworks.
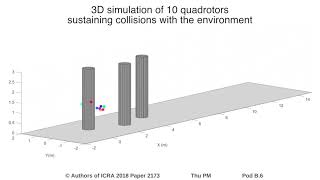
This video shows the capability of the ducted-fan prototype to navigate in an unknown environment while remaining completely ... Xiong, X., & Manoonpong, P. (2021). No Need for Landmarks: An Embodied Neural Controller for ICRA 2018 Spotlight Video Interactive Session Thu PM Pod B.6 Authors: Mulgaonkar, Yash; Makineni, Anurag; Guerrero-Bonilla, ... ICRA 2024 presentation Title: Integrating Predictive Motion Uncertainties with Distributionally