Media Summary: ROS costmap2d issue when using spatio_temporal_voxel_layer Local cost map in the move_base package does not refresh frequently, specifically when the robot is stationary. ROS multi-floor odometry and costmap update issue
Ros Costmap2d Issue When Using - Detailed Analysis & Overview
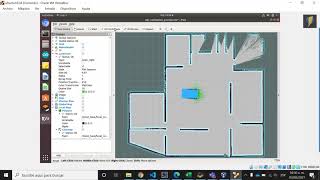
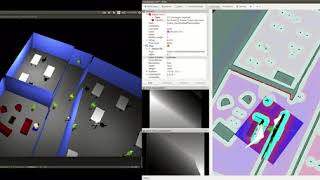
ROS costmap2d issue when using spatio_temporal_voxel_layer Local cost map in the move_base package does not refresh frequently, specifically when the robot is stationary. ROS multi-floor odometry and costmap update issue Moving obstacle information is not being updated in the occupancy grid. In this video I show two "experiments". First, I move the table close to the wall, and the voxel grid (in red) is cleared after removing ... In this video we will have a look at the ros2_persist_parameter_server package by the GitHub user fujitatomoya.
Someone may want to search path which keeps robot away from the obstacles instead of searching shortest path, as well-known ... This video shows local and global costmaps visualized in




![[ROS Q&A] 168 - What are the differences between global and local costmap](https://i.ytimg.com/vi/qPNs6pAZGtA/mqdefault.jpg)