Media Summary: Turtle Bot 3 navigation using custom settings for Wish to get into the shoes of a Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn ... Welcome to our YouTube video about Autonomous Mobile Robots using
Ros Move Base - Detailed Analysis & Overview
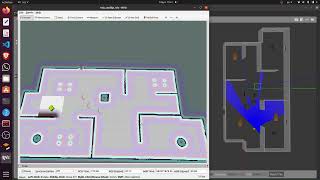
Turtle Bot 3 navigation using custom settings for Wish to get into the shoes of a Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn ... Welcome to our YouTube video about Autonomous Mobile Robots using Video lectures from the undergraduate F1/10 (F1tenth) Autonomous Racing course taught at the University of Virginia. Instructor: ... mobile robot ardumower running on Robot operating system testing of In this video we learn about the powerful
Show how to use the Covered Area package to get the area covered by a robot using







![F1tenth (F1/10) Lecture 9] ROS Transformations and Coordinate Frames](https://i.ytimg.com/vi/XCVtCBbsfGU/mqdefault.jpg)


![ROS 2 MoveIt 2 [1H Crash Course]](https://i.ytimg.com/vi/-xDyxxRiW7M/mqdefault.jpg)
![[ROS] move_base without a map](https://i.ytimg.com/vi/XWwO8ACAg2g/mqdefault.jpg)





