Media Summary: Turtle Bot 3 navigation using custom settings for Wish to get into the shoes of a Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn ... Experimenting with by segmenting the drivable surface and using its centroid's location as a goal for #
Ros Move Base Ros Path - Detailed Analysis & Overview
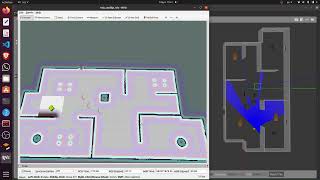
Turtle Bot 3 navigation using custom settings for Wish to get into the shoes of a Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn ... Experimenting with by segmenting the drivable surface and using its centroid's location as a goal for # To simulate robot automatic navigation in vitual environment. - OS: Linux Ubuntu - Service Robot autonomously map an environment and navigate to pickup and deliver objects using "Dijkstra's Algorithm". Github ... In this experiment, the robot is tested within a Gazebo simulation environment utilizing the
Welcome to our YouTube video about Autonomous Mobile Robots using UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". SLAM is an important ...













![[ROS] move_base without a map](https://i.ytimg.com/vi/XWwO8ACAg2g/mqdefault.jpg)



